

Introduction to Linear Models
Solutions to systems of linear equations
Consider the equation Y = Xβ where
 and
and  . For
. For
a given X and Y (observed data), does there exist a solution β to
this equation?
 If p = n (i.e. X square) and X is nonsingular, then yes and
If p = n (i.e. X square) and X is nonsingular, then yes and
the unique solution is  . Note that in this
case, the
. Note that in this
case, the
number of parameters is equal to the number of subjects, and
we could not make inference.
Suppose p ≤ n and Y ∈ C(X), then yes though
the solution
is not necessarily unique. In this case,  is
a solution
is
a solution
since  for all Y ∈ C(X) by Definition
of
for all Y ∈ C(X) by Definition
of
generalized inverse. Consider following 2 cases:
If r(X) = p, (X full rank) then the columns of X form a basis
for C(X) and the coordinates of Y relative to that basis are
unique (recall notes section 2.2) and therefore the solution β
is unique.
Suppose r(X) < p. If β* is a solution to Y = Xβ then
β* + w, w ∈ N(X) is also a solution. So we have the set of
all solutions to the equation equal to
 . Note
. Note
that  is the orthogonal projection operator onto
is the orthogonal projection operator onto
C(X') and so  is the orthogonal
is the orthogonal
projection operator onto  .
.
In general, Y ≠ C(X) and no solution exists. In this
case, we
look for a vector in C(X) that is "closest" to Y and solve the
equation with this vector in place of Y . This is given by MY
where  is the orthogonal projection
is the orthogonal projection
operator onto X. Now solve:
MY = X β
The general solution (for r(X) ≤ p) is given by
 and again there are infinite
and again there are infinite
solutions. Let the SVD of X be given by  . We
. We
know the MP generalized inverse of X is  .
.
Therefore,
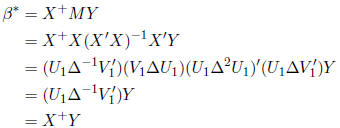
So the general solution is given by

Now assume r(X) = p. In this case, we have
 and so
and so
Random vectors and matrices
Definition: Let  be
a random vector with
be
a random vector with
 and
and  .
The
.
The
expectation of Y is given by
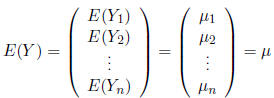
Similarly, the expectation of a matrix is the matrix of expectations
of the elements of that matrix.
Definition: Suppose Y is an n ×1 vector of random
variables.
The covariance of Y is given by the matrix:
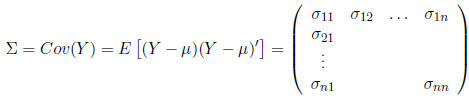
where 

Theorem: Suppose Y is a random n ×1 vector with
mean
E(Y ) = μ and covariance  . Further
suppose the
. Further
suppose the
elements of  and
and
 are scalar constants. Then,
are scalar constants. Then,

and

Definition: Let
![]() and
and
![]() be random vectors
with
be random vectors
with
E(Y ) = μ and E(W) = . The covariance
between Y and W is
. The covariance
between Y and W is
given by

We call this a matrix of covariances (not necessarily square) which
is distinct from a covarince matrix.
Theorem: Let  and
and  be random vectors with
be random vectors with
 and
and
 . Further suppose
. Further suppose
 and
and  are
are
matrices of constant scalars. Then

Theorem: Covariance matrices are always positive
semi-definite.
Proof: Let
 be a random vector and
be a random vector and
 where μ= E(Y ). We need
where μ= E(Y ). We need
to show that for any  . Let Z = (Y -μ ),
then
. Let Z = (Y -μ ),
then
we have:
 |
(since x is a vector of scalars) |
 |
(where w = Z'x) |
 |
Since the expectation of a non-negative random variable
will
always be non-negative. Note that if wi = 0 for all i, then we have
 where zi is the ith column of
where zi is the ith column of
Z'. This implies dependency among the columns and singularity of
the covariance matrix.